daily Arrivée au bureau à 9h Mise en place du poste de travail
Pas de nouveaux messages / mail, ainsi je continue à me former en React et je me rend sur le PC sur lequel est hébergé en local le site web afin de comprendre le fonctionnement, l’arborescence des fichiers et les nomenclatures utilisées par les développeurs avant moi. Mon tuteur m’informe qu’il faudra qu’il me présente un autre projet cette après-midi, ainsi je décide de prendre ma pause repas un peu plus tôt pour être disponible plus tôt si besoin. Je reçois un mail de mon professeur référent concernant le suivi de mon stage, ainsi je l’informe des tâches assignées etc.
Après manger, mon tuteur m’informe de l’heure où il viendra me présenter le nouveau projet. En attendant, je complète une partie de la documentation MQ3.
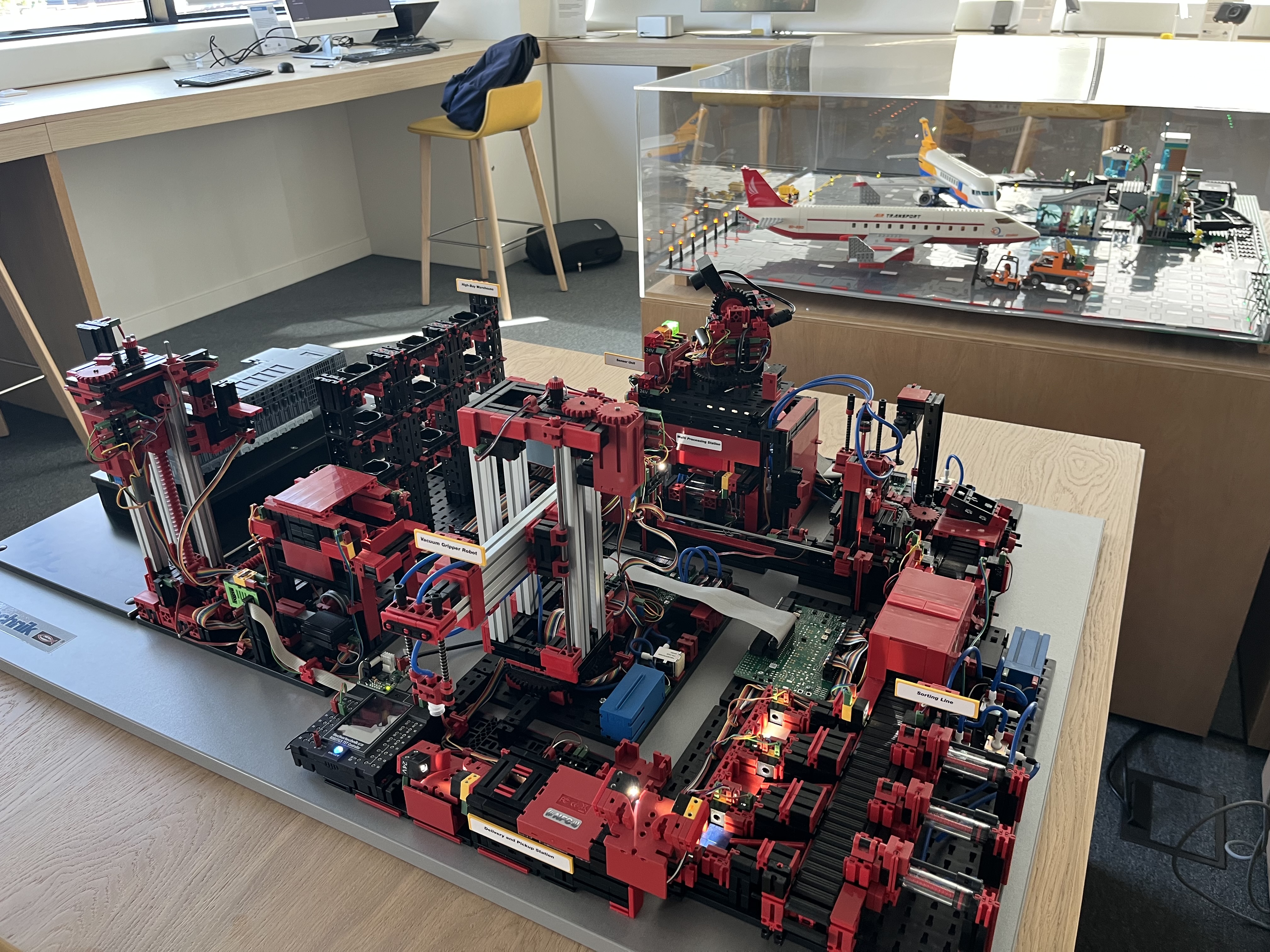
Sr. Tejero, lors de la “réunion”, me présente une maquette de simulation d’usine que nous avons dans le showroom, et m’indique qu’elle ne fonctionne pas depuis un an, plus précisément le détecteur de NFC. Il m’explique brièvement comment elle est censée fonctionne, le rôle des différentes parties de la simulation, l’histoire de la maquette (quand a-t-elle été achetée, dans quel but, etc). Mon rôle sera de trouver de la faille et de voir comment elle peut être réparée.
Je me met ainsi directement au travail, je cherche sur internet avec les différentes informations que j’ai et je trouve le nom de cette maquette : la Fischer Training Factory Industry 4.0. Je me documente, je télécharge les manuels utilisateurs et je commence à les lire. Je vois également dans les commentaires de la vidéo YouTube de présentation de la maquette plusieurs personne reportant un problème avec la machine au bout d’un an environ (même cas que moi).
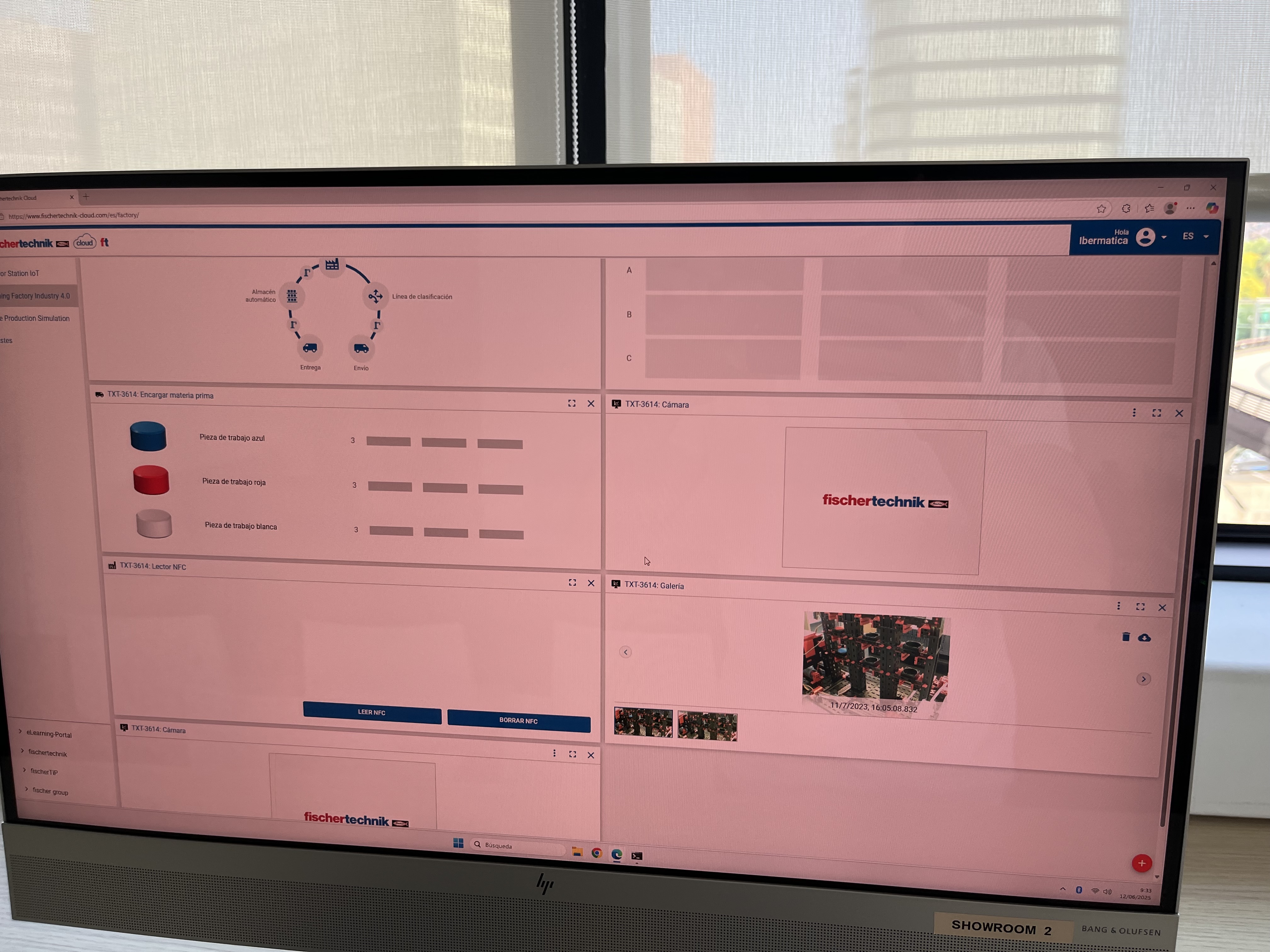
Je vérifie si tout est bien branché sur la machine, j’effectue plusieurs tests avec les capteurs et la connexion. Je finis par déduire que c’est le premier bras ventouse qui est en dysfonctionnement : la machine détecte (et envoie un message au serveur) s’il y a un élément en face du senseur, mais à partir de cette information le bras est censé s’actionner, mais il ne le fait pas. Je regarde si toutes les pièces sont assemblées, et détecte un petit pet’ sur la vis infinie censée faire descendre le bras. Je prends une photo et l’envoie à mon tuteur pour l’en informer. Pareillement, je remarque que la caméra n’envoie pas de données sur le serveur, cela doit être une erreur de configuration réseau, je prends une photo du non-affichage des données et une vidéo où je navigue dans les paramètres actuels du contrôleur pour envoyer à mon tuteur, qu’il me dise quels paramètres sont incorrects. Toutes les photos sont trouvables ci-dessous.

 Il me transfère ensuite un mail du fabriquant de la maquette, détaillant les éventuelles solutions pour réparer la maquette. J’en prends connaissance.
Il me transfère ensuite un mail du fabriquant de la maquette, détaillant les éventuelles solutions pour réparer la maquette. J’en prends connaissance.
Fin de la journée à 17h.
Ressources utilisées au cours de la journée: Full React course by BroCode Présentation de la maquette 2e video de présentation Documents techniques officiels Fischer